We have added a GPS, a 9DOF gyro and some environmental detectors to our system based on Raspberry Pi 3 B+ running Raspbian (Linux). The front-end (dashboard application) are made in Node-Red and displayed over WiFi on an Android tablet mounted on the dashboard of my car.
Data from sensors are distributed over WiFi or directly to a MQTT-server on the Raspberry and stored in a SQLite database on a USB-memory stick if necessary. Several small programs are made in Python or Javascript to handle data from the sensors and the MQTT server.
Gasbottle monitor
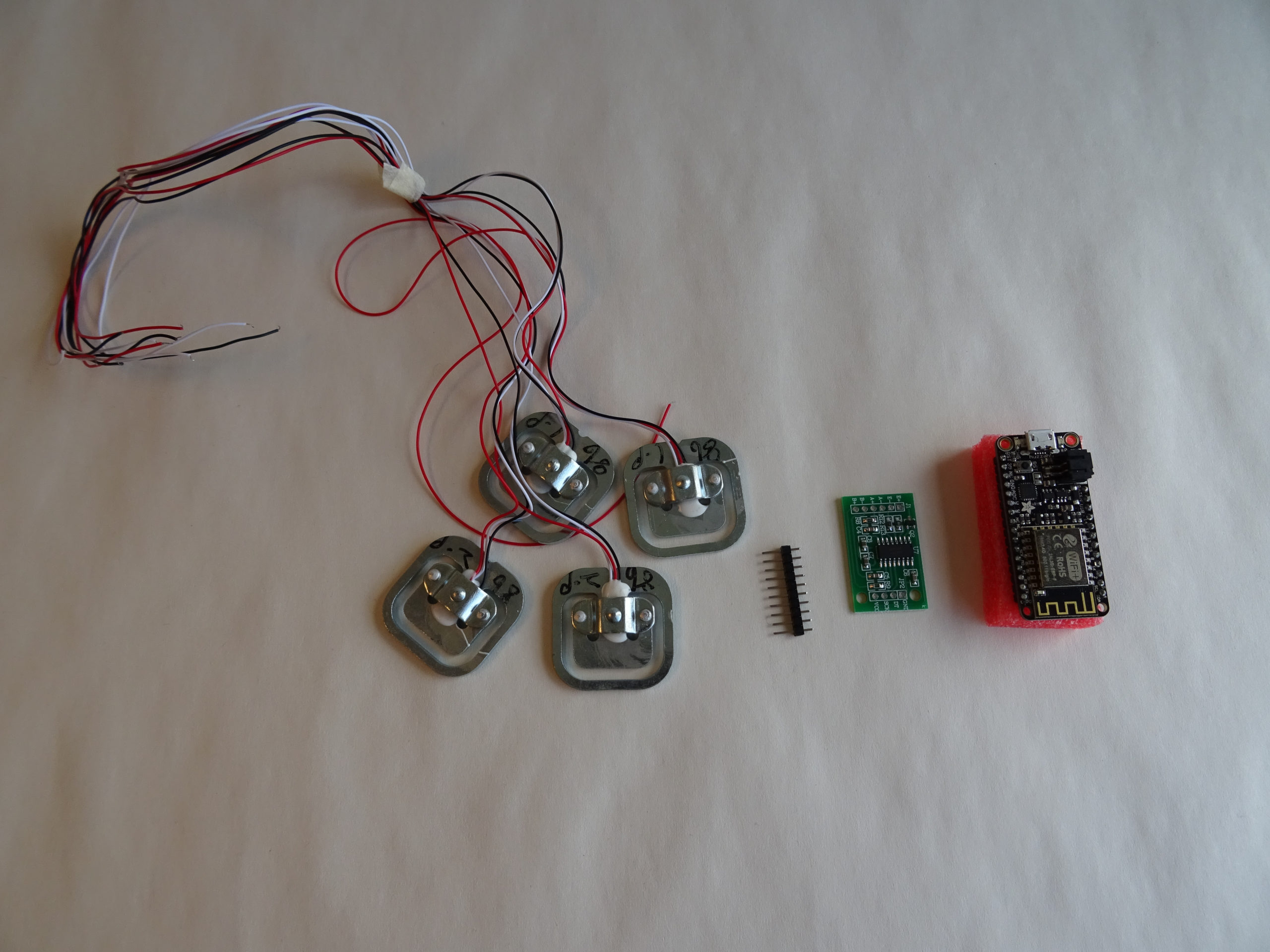
We have made a prototype weight for the gasbottles via a modified bathroom scale and an ESP32 with a small display. We can read the persentage left in the bottle on the display. The small ESP32 communicates via WiFi to the Raspberry Pi and we can monitor consumption and make some qualified guesses for how long the bottle will last and a lot of other statistics if we want.
We are going to 3D-print a rounded plastic housing for the next prototype using cheap load sensors (wheatstone bridge), a D/A converter, an ESP32 and recargable battery for the next prototype.
Inclinometer
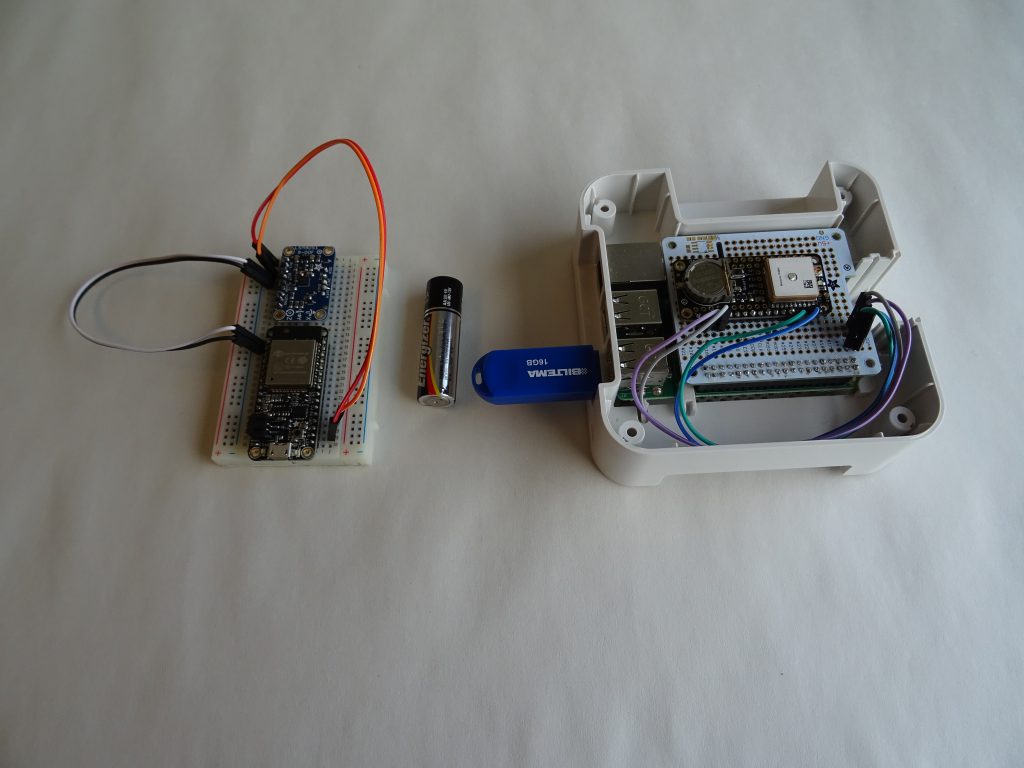
We are also experimenting with a 9DOF (currently based on BNO055 but it seems to require a BNO080 for better presition) connected to an ESP32 for levelling of our motorhome. We are for the most part using freecamping sites where the ground seldom are straight and level…. The ESP32 runs as a WEB server (using Flask) and we have a graphical display on the phone or tablet showing wich wheels are low and by how much they need to be rised. Much like the gyros on the dashboard for ofroad cars, but with better resolution.
The 9DOF and ESP32 are seen to the left in the picture below. Again communicating over WiFi.